
IDEC株式会社により出願された特許
41 - 50 / 188
操作スイッチ
【課題】 部品点数を削減でき、製造コストおよび組立コストを低減できる操作スイッチを提供する。
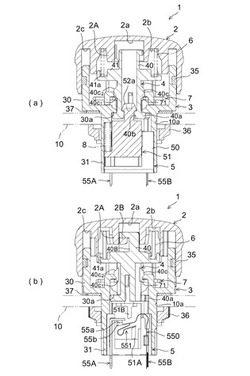
【解決手段】 スイッチケース3に保持された押ボタン2の操作により、スイッチケース3内に収容された固定接点55a、56aおよび可動接点55b、56bの接触状態が解除される押ボタンスイッチ1を構築する。この場合において、スイッチケース3内には、接触状態におかれた固定接点55a、56aおよび可動接点55b、56bを開離方向に付勢する開離付勢手段としての第1の板ばね550が設けられており、第1の板ばね550の一端には、固定接点55aに対して接離可能な可動接点55bが設けられている。第1の板ばね550は、当該板ばねの変位が零のときに、可動接点55bが固定接点55aから開離した位置に配置されるように設けられている。
(もっと読む)
スイッチ装置用ばね構造体

【課題】 スイッチ装置において部品点数を削減できるばね構造体を提供する。
【解決手段】 押ボタン2の操作により接断される押ボタンスイッチ1において、スイッチケース3内に固定された固定接点55aに対して接離可能な可動接点55bを一端に有し、例えば略中央部に屈曲部550aを有する略L字状の第1の板ばね550と、一端が第1の板ばね550の可動接点55b側と逆側に連結され、例えば略中央部に屈曲部551aを有するとともに、他端がスイッチケース3内に設けられた第1の当接指51Aに当接し得る略U字状の第2の板ばね551とから、スイッチ装置としての押ボタンスイッチ1の接点を付勢するためのばね構造体を構築する。この場合、第2の板ばね551の他端が第1の当接指51Aに当接することにより、第1の板ばね550の可動接点55bが固定接点55aに接触するようになっている。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
発光装置
【課題】 照射光の向きを簡単にかつ確実に変更でき、しかも安全に操作できる発光装置を提供する。
【解決手段】 光源としてLED11を内蔵する発光管2と、発光管2の両端に配置され、外部のソケット部に対して着脱自在に接続されるピン端子30をその一端に有する口金部3と、発光管2と口金部3の間に設けられ、発光管2の口金部3に対する回転角度位置を変更可能な回転角度位置変更手段とから発光装置1を構成する。回転角度位置変更手段は、口金部3の側に設けられるとともにピン端子30に電気的に接続された出没自在なボール35と、発光管2の側の導電性エンドプレート24上において円周上に均等間隔で配設され、ボール35が係脱自在に係合し得る複数の穴25とから構成されている。エンドプレート24は、基板10の配線部分に電気的に接続されている。
(もっと読む)
照明装置
【課題】電源のオン/オフを含む光源の照明光に関する複数の機能の制御を同一部材の同一方向の操作によって行うことができるようにし、構造及び操作の簡略化を実現する。
【解決手段】照明装置10において、筐体11の背面から露出したハンドル8の外周部を把持してハンドル8を回転させると、円筒カム7がハンドル8と一体的に回転する。円筒カム7の前面側端には周面に沿ってカム面が形成されている。操作プレート5,6の背面側端は、円筒カム7のカム面に当接している。円筒カム7がハンドル8とともに回転すると、カム面の変位によって操作プレート5,6がX方向に沿って移動する。操作プレート5の前面側端は、電源スイッチ4の可動接点部4Aに背面側から選択的に当接する。操作プレート6の前面側端は、レンズ保持体3から背面側に延出した軸部3Aの背面に選択的に当接する。
(もっと読む)
安全制御システムおよび安全制御方法
【課題】 設備内に進入する移動体を無線で安全に制御できるようにする。
【解決手段】 安全制御システム1において、制御対象領域A〜Dにそれぞれ対応して設置され、無線により移動ロボット10を停止させるための停止スイッチ2a〜2dと、制御対象領域A〜Dに進入する移動ロボット10を検知するアンテナ4a〜4eと、各アンテナ4a〜4eで検知された移動ロボット10に対して停止スイッチ2a〜2dを有効にするとともに、停止スイッチ2a〜2dの操作に基づいて当該停止スイッチに対応する移動ロボット10を停止させるよう制御する制御部とを設ける。この場合には、移動ロボット10の進入の度に当該移動ロボット10が検知されて、停止スイッチ2a〜2dが当該移動ロボット10に対して有効にされるので、制御対象領域内に進入する移動ロボットを無線で安全に制御できるようになる。
(もっと読む)
他の機器との通信を行う機器
【課題】 ユーザがコネクタと信号との関係を熟知していなくとも、機器と機器との間を正しいコネクタ接続関係にて接続することができる技術を提供する。
【手段】 接続関係決定手段58は、コネクタ52を介して他の機器が接続された状態において、切換手段54を制御して、コネクタ52の各端子と送受信制御手段56の各端子の接続関係を順次切り換えていく。そして、各接続関係において、送受信制御手段56、切換手段54、コネクタ52を介して他の機器に対してコマンドを送信し、当該コマンドに対する他の機器からの正常なレスポンスが、コネクタ52、切換手段54、送受信制御手段56を介して受信できたか否かを判断する。次々と接続関係を切り換え、上記と同様にしてコマンドを送信し、正しいレスポンスが得られるかどうかを判断する。正常なレスポンスが得られると、接続関係決定手段58は、その時の切換手段54による接続関係を、正しい接続関係として維持する。
(もっと読む)
表示機能付きスイッチ装置
【課題】 制御対象機器51への影響なしに、保守管理データを表示させる。
【手段】 モード切替用ディップスイッチ44が、多機能スイッチ制御対象機器51と液晶上部スイッチ41の間に直列接続されている。したがって、モード切替用ディップスイッチ44をメンテナンスモードに切り換えることにより、液晶上部スイッチ41と多機能スイッチ制御対象機器51とが切り離されるので、液晶上部スイッチ41を操作しても、多機能スイッチ制御対象機器51への影響がない。モード切替用ディップスイッチ44が、メンテナンスモードである場合には、液晶上部スイッチ41の入力パターンを判断して、保守管理データをLCD33に表示する。
(もっと読む)
安全スイッチ
【課題】操作ロッドが破損したり、操作部が破損したり脱落した場合に開閉器を開状態にすることで安全性の向上を図るとともに、簡易な構成で小型化を図ることができる安全スイッチを提供する。
【解決手段】アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより、回転軸13の操作部5内での支持状態が解除されても、操作ロッド21のコイルばね50の付勢方向への移動が許容されて操作ロッド21が確実に操作部5側へ移動するので第1開閉器39を確実に開状態とすることができ、安全性の向上を図ることができる。また、安全スイッチの異常時の操作ロッド21の移動状態を検出するための開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
(もっと読む)
ロボットハンド
【課題】チャックの把持制御に用いる電磁弁の有効利用が図れてコストダウンに寄与できるロボットハンドを提供する。
【解決手段】ロボットハンド3は、産業用ロボットのアームに装着されるハンド本体部31と、ハンド本体部31に着脱自在で、エアーEfを用いたシリンダCLの駆動によってワークを把持するチャック4の取付けが可能なハンド先端部32とで構成されている。そして、ハンド本体部32は、外面に設けられたエアー入口開口350を始端とする1本の流路35pからエアーEfが供給される流路5pの終端に接続する入力ポートと、ハンド本体部31の内部に形成された流路5q、37pを介してハンド先端部32にエアーEfを供給する出力ポートとを備えた電磁弁50を有している。これにより、別個のハンド先端部32間でハンド本体部31の電磁弁50の共有化が促進されるため、電磁弁50の有効利用が図れてコストダウンに寄与できる。
(もっと読む)
41 - 50 / 188
[ Back to top ]