
株式会社ダイヘンにより出願された特許
71 - 80 / 990
2ワイヤ溶接のクレータ制御方法
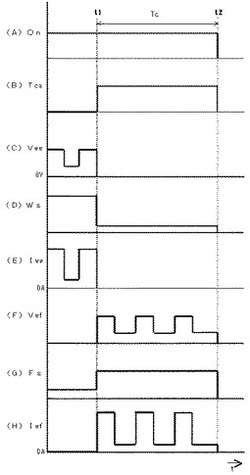
【課題】2ワイヤ溶接において、健全なクレータ部を形成すること。
【解決手段】定常期間(時刻t1以前)中は、溶接ワイヤと母材との間に溶接電圧Vwwを印加し溶接電流Iwwを通電してアークを発生させると共に、このアークによって形成された溶融池にフィラーワイヤを接触させながら送給Fsして行う2ワイヤ溶接のクレータ制御方法において、クレータ期間Tc中は、溶接ワイヤと母材との間に発生しているアークを消弧すると共に溶接ワイヤの送給Wsを継続し、送給Fsを継続しているフィラーワイヤと母材との間に溶接電圧Vwfを印加し溶接電流Iwfを通電してアークを発生させ、このアークによって溶接ワイヤを溶融してクレータ処理を行う。フィラーワイヤのアークと溶接ワイヤの挿入とによってクレータ処理を行うので、溶融池が効率よく冷却され健全なビードが形成される。
(もっと読む)
フィラガイドの位置調整機構

【課題】TIG溶接ロボットの周辺機器に干渉する虞がないフィラガイドの位置調整機構を提供する。
【解決手段】
位置調整機構20は、溶接ロボットの手首部に支持されるとともに、フィラワイヤを挿通する挿通孔22c,23bを有する支持部21と、支持部21に対して挿通孔22c,23bの軸心と同軸に配置され、該軸心に沿って移動調節自在に配置され、フィラガイド40を着脱自在に取着する可動部材28を備える。フィラガイド40の先端は、チップゲージ34が着脱自在である。作業者は、フィラガイド40のチップゲージ34の位置が、固定ゲージの先端位置に合致していない場合には、差分を解消するべくフィラガイド40を移動させる。
(もっと読む)
溶接ロボット制御装置
【課題】
レーザセンサを用いて相対位置方式により教示点の位置補正を行う場合、レーザセンサの着脱等により溶接トーチとの取付位置関係が狂うと、教示修正に多大な時間を要する。
【解決手段】
S10でレーザセンサと溶接トーチ間のキャリブレーションを行い、新センサ−トーチ変換行列CT2Tを得て、S20で記憶部に格納する。S30で差分変換行列OTNの演算を行う。S40で予め選択しておいた作業プログラムに対して、センシング命令に記憶された検出基準点を探索する。S50で、見つけ出した検出基準点に対してそれぞれ差分変換行列OTNを乗算して、検出基準点を更新する。
(もっと読む)
系統連系インバータ装置
【課題】スイッチングノイズを低減し、系統連系インバータ装置の小型・軽量化を図る。
【解決手段】コントローラ7は、パルス幅変調信号の変調度がスイッチングノイズを最小にする最適変調度となるような振幅の変調波を生成する変調波生成部7dとその変調波を用いてパルス幅変調信号を生成するPWM信号生成部7eを備える。変調波生成7dは、変調波テーブル7aから最適変調度となる振幅の変調波の波形データを読み出し、その波形データの位相を力率調整部7bで算出した位相(無効電力を制御目標に追従させるための位相)を用いて補正することにより変調波を生成する。そして、PWM信号生成部7eがその変調波のレベルと所定の三角波のレベルを比較してPWM信号を生成する。PWM信号の変調度が最適変調度に固定されるので、スイッチングノイズが抑制される。
(もっと読む)
2ワイヤ溶接制御方法
【課題】消耗電極アークにフィラワイヤを送給して溶接する2ワイヤ溶接方法において、フィラーワイヤの溶着量を増大させて溶接効率を向上させる。
【解決手段】消耗電極と母材との間にアークを発生させて溶融池を形成し、フィラーワイヤを溶融池の後半部に挿入しながら溶接する2ワイヤ溶接制御方法において、フィラーワイヤを溶接方向の前後方向にウィービングして、フィラーワイヤの挿入位置の変位量Lhを正弦波状に変化させる。そして、フィラーワイヤの送給速度Fwを変位量Lhに比例させて正弦波状に変化させる。これにより、フィラーワイヤの挿入位置がウィービング中心位置よりも前側方向にあるときはフィラーワイヤの溶融を促進してフィラーワイヤの送給速度Fwを高速化し、後側方向にあるときは溶融池の冷却及び盛り上がりを押さえてハンピングビードの形成を抑制している。
(もっと読む)
電力変換回路を制御する制御回路、この制御回路を備えた系統連系インバータシステム
【課題】スイッチング素子のスイッチングを周期的に停止させてスイッチングロスを低減することができ、かつ、正極側のスイッチング素子がオン状態になっている時間と負極側のスイッチング素子がオン状態になっている時間との差を小さくすることができる制御回路を提供する。
【解決手段】線間電圧指令値信号Xuv,Xvw,Xwuから指令値信号Xu1,Xv1,Xw1を生成する指令値信号生成手段と、指令値信号Xu1,Xv1,Xw1に基づいてPWM信号を生成するPWM信号生成手段とを備えた。指令値信号Xu1,Xv1,Xw1は、所定の期間で「0」を継続し、他の所定の期間で所定値「2」を継続する。したがって、生成されるPWM信号がローレベルを継続する期間とハイレベルを継続する期間との差を小さくすることができる。
(もっと読む)
溶接ロボットシステム
【課題】溶接部位検出器を使用せずにギャップ長GLを算出する溶接ロボットシステムを提供する。
【解決手段】本発明の溶接ロボットシステムは、第1上部電極位置算出回路LC1が、スポット溶接を行うために上部電極1aを母材Wに接触させたときに第1上部電極位置を算出する。電流指令値生成回路ICが加圧力設定値に基づいてサーボモータMを駆動し、上部電極1aが加圧して上部板が下部板に接触したときに、第2上部電極位置算出回路LC2が、第2上部電極位置を算出する。ギャップ長算出回路GCが、第1上部電極位置と第2上部電極位置とからギャップ長GLを算出し、スポット溶接電源SPSが電力を供給する。これらを有するスポット溶接ロボットSRと、スポット溶接を行った位置のギャップ長GLを入力して、溶接条件を変更してアーク溶接を行うアーク溶接ロボットARとを備える。
(もっと読む)
溶接位置検出方法、及び溶接位置検出装置
【課題】
溶接線の進行方向が大きく変化するワークに対してセンシングを行う場合、進行方向の変化に応じてロボットの姿勢を変更する必要がある。このため、教示に時間を要したり、ロボットがワークや治具等と干渉したりする。
【解決手段】
マニピュレータM1に取付けられた溶接トーチ14に対して開先位置検出センサLSが可動機構62を介して設けられる。溶接線の進行方向が変化する場合は、開先位置検出センサLSの溶接トーチ14に対する相対位置であるセンシング位置を、ロボットの姿勢変更により変更するのではなく、可動機構62により変更するようにしている。教示工数低減、干渉低減を図ることができる。
(もっと読む)
巻鉄心製造装置
【課題】単位鋼板の積層体からなる鉄心ブロックを巻回積層装置に向けて搬送して、搬送した鉄心ブロックを鉄心ブロック供給装置を通して巻回積層装置に供給することにより巻鉄心を製造す巻鉄心製造装置において、搬送された鉄心ブロックの先端が、鉄心ブロック供給装置の入口に干渉するのを防止する。
【解決手段】鉄心ブロック1を鉄心ブロック供給装置5に向けて搬送する過程で鉄心ブロックをクランプするクランプ装置403に、鉄心ブロックの横断面の輪郭形状を湾曲した形状とするように搬送中の鉄心ブロックに撓みを生じさせる撓み付与手段を設けた。
(もっと読む)
冷却ユニット及びこれを用いたワーク搬送装置
【課題】高温状態のワークからの輻射熱による前記ワークの周辺部品に対する影響を減少させることができ、且つ冷却媒体が漏れたり真空リークが発生したりすることがなく、また、コストの減少させることができ、また、ワーク搬送機構の旋回角度を規制することがない冷却ユニットを提供する。
【解決手段】冷却ユニット100は、その外壁部122がワーク搬送機構20の被冷却面Pに密着した状態でワーク搬送機構20に取り付けられ、被冷却面Pから外壁部122を介して伝導された熱によって下側空間S1に収容された冷却媒体を蒸発させ、冷却媒体が蒸発する際に奪われる気化熱によって外壁部122を介して被冷却面Pを冷却し、下側空間S1の内部の蒸気圧が一定以上になると蒸気放出ユニット130によって下側空間S1の内部の蒸気を真空室に放出する。
(もっと読む)
71 - 80 / 990
[ Back to top ]